在过去50余年的时间里,线性控制方法得到了空前的发展,在工业过程、航天、军事等领域取得了瞩目的成就。控制器设计与分析大多需要精确的线性模型。因此,为了运用线性系统理论处理非线性控制问题,学者们提出了很多线性化方法。然而,现有的线性化方法存在很多问题,如依赖精确模型信息,不可避免的模型误差,引入过多的参数等。
近日,自动化学院池荣虎教授团队在线性化方法与非线性控制领域取得重要进展,在中科院一区TOP期刊IEEE Transactions on Industrial Electronics上发表了题为“Discrete-time Extended State Observer based Model-free Adaptive Control via Local Dynamic Linearization”(DOI:10.1109/TIE.2019.2947873)的文章。该论文以yl23455永利官网为第一完成单位,池荣虎教授为第一作者和通讯作者,自动化学院博士生惠宇为第二作者。(IEEE Transactions on Industrial Electronics是电气电子领域国际顶级期刊,主要报道信息、控制、电气及工业电子等领域最新的研究进展,期刊影响因子7.168,属于SCI一区TOP期刊。)
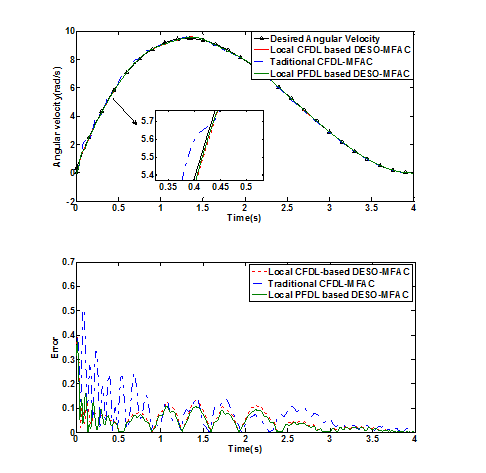
团队提出了一种局部紧格式动态线性化(Local-CFDL)方法,将非线性非仿射系统转化为包含线性参数化项和未知非线性时变余项的仿射系统,未知的非线性余项包含了系统不确定性和外部扰动。提出了一种离散时间的扩张状态观测器(DESO)来估计未知的非线性余项,并以此提出了基于DESO的无模型自适应控制(DESO-MFAC)方法,可充分利用DESO对扰动的补偿作用,提高控制器抑制系统不确定性的能力。进一步,团队利用多时间窗口的输入信息,提出了局部偏格式动态线性化(Local-PFDL)方法,以及基于该线性化的无模型自适应控制方法。
该工作得到了国家自然科学基金、山东省泰山学者人才工程、山东省重点研发计划、山东省自然科学基金等项目的支持。

